

在國內(nèi),約300萬輛叉車存在著大量的因為盲區(qū)、疲勞、超速、轉(zhuǎn)向?qū)е碌膭幉洹⑴鲎病⒛雺骸⒆曹嚨葠盒允鹿拾l(fā)生的情況,造成了產(chǎn)線停工、大量賠償、領(lǐng)導(dǎo)追責(zé)等嚴(yán)重后果。因此。叉車防撞是叉車安全管理的重要手段之一。

叉車在我們的工作與生活中經(jīng)常可以見到,是代替原有的人力所搬運的機械設(shè)備,大大提高了工作效率。機械畢竟是機器,為了防止安全事故,研發(fā)叉車防撞系統(tǒng),為我們的人身及財產(chǎn)在工作過程中提高了安全保障。

電子叉車防撞?系統(tǒng)是警告叉車司機當(dāng)它檢測到在5-20米的范圍內(nèi)設(shè)定其他車輛的解決方案。
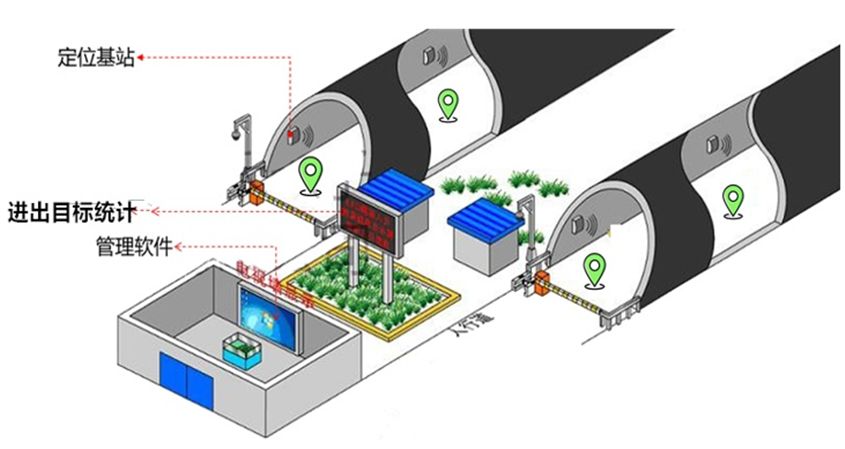
隧道人員定位?系統(tǒng)在使用的時候有哪些基本功能,它的基站系統(tǒng)架構(gòu)是怎樣的呢?
uwb定位系統(tǒng)是一種以基站為基礎(chǔ)的定位方式,和GPS定位系統(tǒng)不同的是,它主要應(yīng)用于室內(nèi)定位。下面就uwb定位的方法展開簡單的介紹。
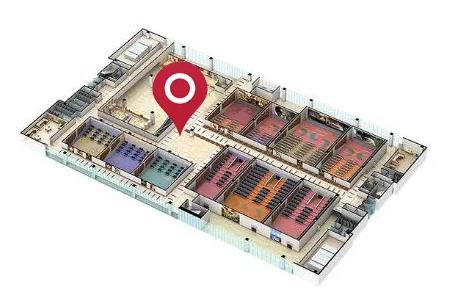
uwb人員定位系統(tǒng)模式和系統(tǒng)功能有哪些?今天我們就來分別說一說。